サンプルプログラムの実行¶
実行手順¶
まずはsshでログインします。Raspberry Piに有線LANを接続してください。
sshコマンドが使える環境では以下のコマンドでログインできます。
ssh ubuntu@ubuntu.local
本チュートリアルに従ってmicroSDを用意した場合、Tiryoh/raspigibbon_standaloneがホームディレクトリにすでにコピーされています。 サンプルプログラムを実行してみます。 Raspberry Pi Gibbonが動き出すので注意してください。
cd ~/raspigibbon_standalone/src/
./open_hand.py
待機姿勢にしてからサーボをオフにしてみます。Raspberry Pi Gibbonが動き出すので注意してください。
./hand_rest.py
以上でサンプルプログラムの実行ができました。
プログラムの説明¶
このサンプルプログラムはTiryoh/RS30Xを使用しています。 以下のようなプログラムを書けば簡単にサーボを制御することができます。
#!/usr/bin/env python
# coding:utf-8
import time
from RS30X import RS304MD as RS30X
if __name__ == '__main__':
servo = RS30X()
for i in range(1,6):
servo.setTorque(i, True)
time.sleep(0.01)
for i in range(1,6):
servo.setAngle(i, 0)
time.sleep(0.1)
先ほどの動作確認の章で紹介した起動時のスクリプトは~/raspigibbon_standalone/standalone.shです。
このスクリプトでは~/raspigibbon_standalone/scriptsにあるスクリプトを呼び出しています。
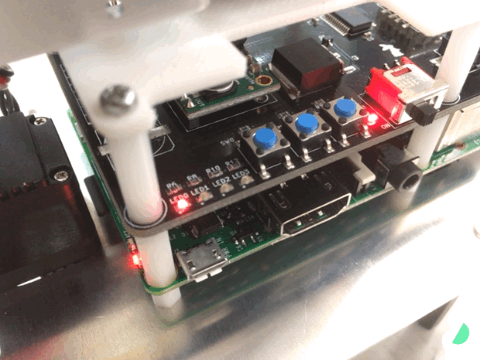
たとえば、先ほどはLED0のみが点灯している状態、つまり2進数表示では「1」となり、動作モードは1を選択しています。
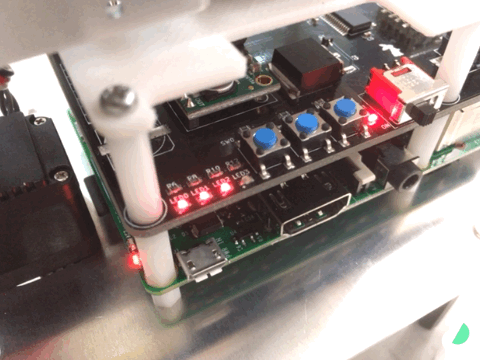
この状態の場合は「7」です。
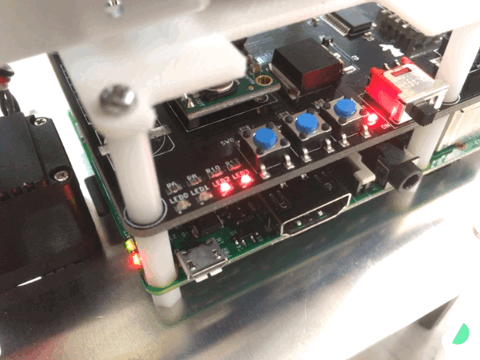
この状態の場合は「12」です。
動作モード1ではscript1.shを、動作モード2ではscript2.shをというようにスクリプトを呼び出しています。つまり、script3.shを作成すれば動作モード3で作成したスクリプトを呼び出すことができますし、script4.shならば動作モード4で呼び出せます。
動かしたいスクリプトを作成して起動時に実行してみてください。